
一个平台适配多种车型:一套自动驾驶系统如何同时做到高效与场景通用?
L4 级自动驾驶已经进入到规模化落地运营的阶段,越来越多适配不同商业场景的自动驾驶车辆驶入公开道路。
一套好用的 L4 级自动驾驶系统,势必要面对来自不同运行地区、不同气候状况、不同场景的多样化挑战,同时还要在各地收集路测和运营数据来提升系统的核心能力。
那么如何保证这套系统的普适性,保证车队的投放效率以及运营维护过程中的便利性,找到自动驾驶车辆安全性、成本、规模化之间的平衡点,成为很多 L4 级自动驾驶通用方案公司需要解决的难题。
1、轻舟智航打造「自动驾驶超级工厂」
此前已经在自动驾驶网约巴士(Robobus)领域打出声量的轻舟智航自研的一套自动驾驶解决方案「Driven-by-QCraft」就一直在朝着这个方向努力,不断追求系统的高效适配。
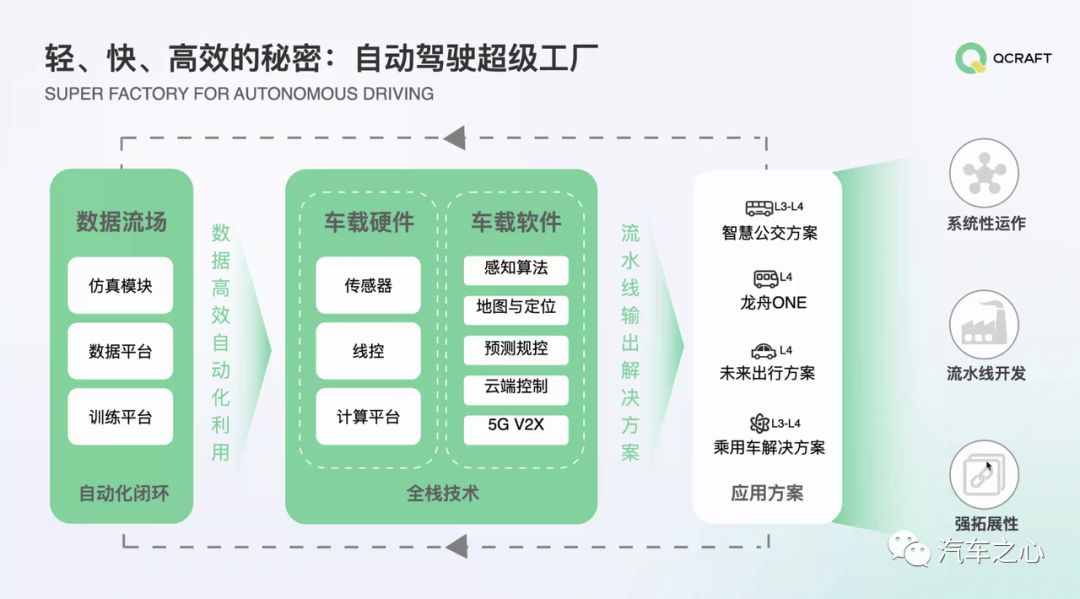
为此,轻舟智航打造了一间「自动驾驶超级工厂」,这间「工厂」中,有车载硬件、车载软件以及专注于处理海量道路环境数据来进行仿真训练的「数据流场」。
这三者共同协作,推动自动驾驶方案形成迭代闭环。
现阶段,轻舟智航的「Driven-by-QCraft」方案:
在自动驾驶硬件上进行了模块化的设计,一套标准化的硬件方案可以在 Robobus、Robotaxi 以及其他车型上进行搭载,传感器数量可以按需增减。
按照轻舟智航的介绍,他们这套系统已经在 10 款车型上进行搭载,包括主力车型自动驾驶网约巴士「龙舟 ONE」,还有公交车、Robotaxi 等车型。

在自动驾驶软件层面,得益于其 4 位核心团队成员都出自全球顶尖自动驾驶公司 Waymo,轻舟智航在感知算法、地图与定位、 决策规划、云端控制等技术模块上都拥有自研能力,而且这套软件系统同样具有不同场景以及不同车型的适配性。
此外,在「数据流场」的支持下,轻舟智航的自动驾驶车辆可以先集中在一地进行研发,然后再投放到多地进行测试和运营,自动筛选归类出高价值的数据,进行大规模的仿真训练,推动系统的 OTA。这样一种模式,可以让 A 地发现的问题在被解决后,在 B 地不会再发生,高效协同。
目前,轻舟智航的自动驾驶车队已经在中美 10 座城市展开测试或运营,车队规模预计在年底超过百台,而且后续还会与合作伙伴结盟,让「数据流场」发挥更大的效能。
正是基于自研的「自动驾驶超级工厂」,提升开发和部署的效率,轻舟智航才能够在短短一年时间里快速复制,落地十座城市。
轻舟智航的目标是「将无人驾驶带进现实」,以上仅仅是阶段性成绩,在自动驾驶软、硬件上,轻舟智航还在持续迭代。
2、解密轻舟智航第三代自动驾驶硬件方案
最近,轻舟智航发布了他们的第三代自动驾驶硬件方案。
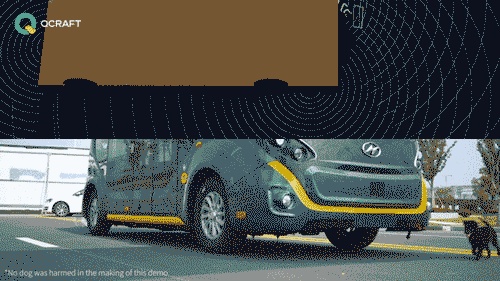
这套方案在感知层面通过对传感器配置以及安装位置/方式进行革新,实现了对车辆周围 360 度范围的感知全覆盖,做到无死角、无盲区。
特别是针对小体型物体,比如皮球、小狗、儿童这样的目标物的感知也能非常精准。这大大提升了自动驾驶系统的安全性。

在计算单元层面,轻舟智航新一代的方案进行了三重冗余设计,包含了主计算单元(OMC)、备份计算单元(OBC)以及车载计算单元(OCC)。

这样设计的目的是为了充分保障车辆在发生部分器件失效时还能安全停车。
其中,主计算单元负责的是自动驾驶系统软件的运行和计算,如果主计算单元出现故障,备份计算单元将接管车辆控制,让车辆可以在突发状况下靠边停车、紧急刹车等。
就像人类的「大小脑」一样,互相配合、互为冗余。

而在 11 月 9 日举行的英伟达 GTC 大会上,轻舟智航宣布,在其下一代计算平台中,将会采用英伟达的新一代自动驾驶芯片 Orin,这也让轻舟智航成为国内首家使用 Orin 芯片的 L4 级自动驾驶通用方案公司。
根据轻舟智航的规划,他们在今年底就会实现 Orin 的搭载上车,因为此前已经有 Xavier 适配的经验,所以在一些核心模块上进行调整后就可以实现计算芯片的整体迁移。
目前,英伟达 Orin 的开发板已经在国内 Tier 1 手中开发到了 B 样件的阶段,很快就将量产,2022 年也会是国内 Orin 芯片的量产大年。

另外,轻舟智航还在第三代硬件方案里优化了电源系统。针对不同的天气状况、道路条件,系统会适时关闭一些耗电项目,比如在天气晴好的时候,可以减少某类传感器工作的数量,集中供电给核心功能模块即可,这样能在一定程度上降低功耗、省电,延长车辆运行里程;
另外,电源系统也有冗余备份,能够在特殊故障时,保证系统的正常运行,拒绝「黑屏」事件的发生。
具体看看轻舟智航的第三代感知硬件方案:
2 个长距离测量激光雷达;
3 个近距离补盲激光雷达;
4 个毫米波雷达;
9 个感知摄像头;
1 个 IMU 套装。
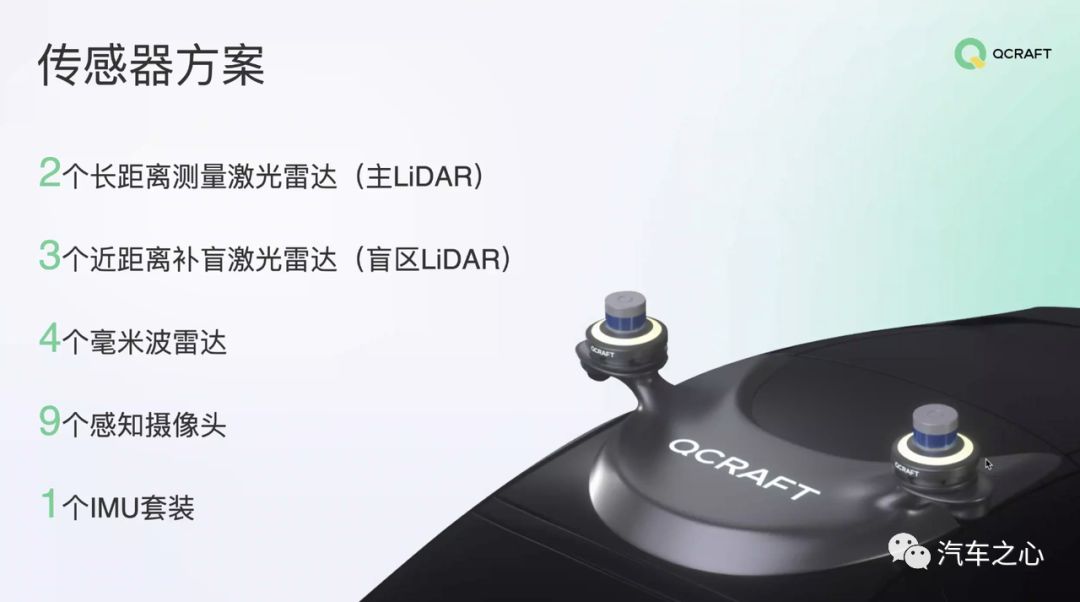
这套方案用了 5 颗激光雷达,车顶左右各两颗,上方两颗是主激光雷达,来自禾赛科技,下方有圆形遮罩的是补盲激光雷达,还有一颗补盲激光雷达位于车辆尾部,补盲雷达出自速腾聚创。

5 颗激光雷达的配置在成本上是不是超标了?
针对这个问题,轻舟智航联合创始人、CTO 侯聪表示,这套方案的成本相比于前代方案的成本反而降低了,主要是因为现在国产激光雷达技术已经很成熟,而且出货量也在不断增加,因此单个传感器成本也在不断降低,而且这套方案用了两个主激光雷达,其他三颗是价格更低的补盲雷达,成本上可控。
在安装方式上,Robotaxi 车顶 4 颗激光雷达分为两组,采用了悬浮式安装方式,这两组激光雷达互为冗余,任何一组失效,另外一组都能支撑起车辆的环境感知。
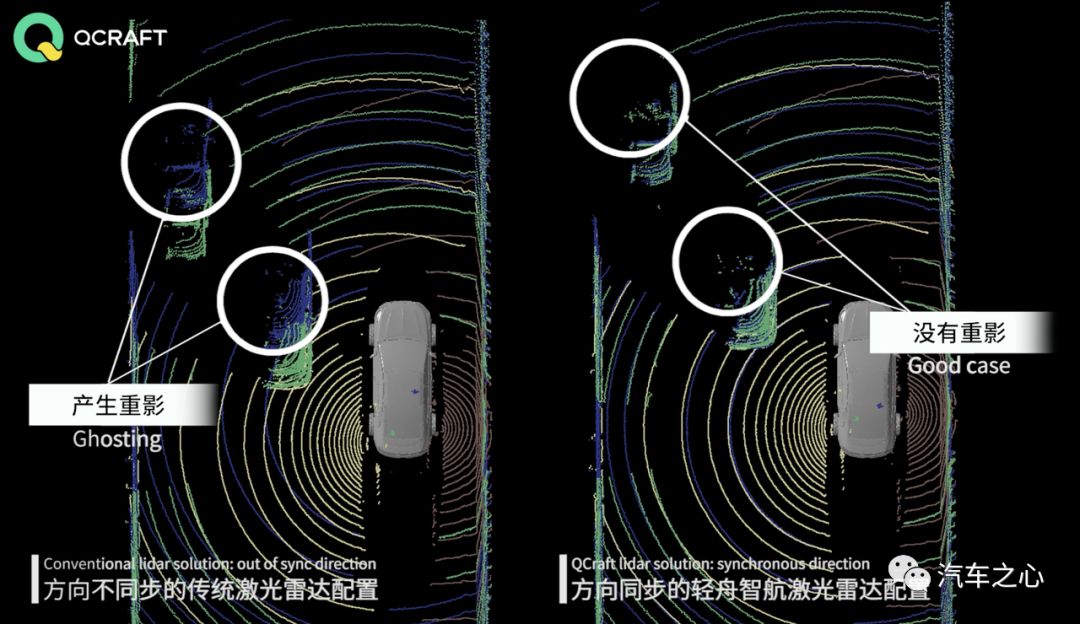
另外,5 颗激光雷达在旋转方向上实时保持一致,这样其在检测动态物体的时候就不会出现明显的错位或者是重影的现象,而且返回的点云数据也可以集中处理,让感知更加精准。
除了 5 颗激光雷达值得关注,轻舟智航这套传感器硬件在摄像头层面也做了革新。
首先是单独定制设计了专门的红绿灯识别摄像头,这颗摄像头可以在不受环境光干扰的情况下,识别出 150 米外的红绿灯形状和颜色。和红绿灯识别摄像头邻近的还有一颗前视的主摄像头。

余下的 7 颗环视摄像头则是环绕在左右两组激光雷达周围,皆为 500 万像素,而且其安装方式采用逆时针旋转 90 度的方式,让纵向的视场角更大。

这种安装方式让摄像头的逐行曝光方向与激光雷达的扫描方向保持一致,这样让图像数据和点云数据的前融合效果更佳,而且还能减少地面的盲区,特别是对小体积物体比如交通锥、儿童、小动物等等的探测。
自动驾驶车辆要应对各种天气状况和不同的场景,暴露在外的传感器难免会出现各种脏污的情况,为此,轻舟智航为这些传感器配上了自清洁系统,让其免受水雾、灰尘、污垢的侵扰。
在自动驾驶硬件套装的成本方面,激光雷达以及计算芯片占了大头,轻舟智航一直在优化这块的成本,让自动驾驶车辆能够更加安全同时也能以更经济的方式落地。
根据轻舟智航联合创始人、CEO 于骞此前的预测,未来 2 年,车辆的自动驾驶改装成本可以控制在 10-15 万元级别(激光雷达占其中 2-3 万元),整体算下来和一名司机 2 年的薪资差不多,这将是自动驾驶更能规模化的成本区间。
通过第三代自动驾驶硬件方案的探索,轻舟智航正在努力找到自动驾驶车辆安全、成本、规模化之间的平衡点。
3、轻舟智航 Robotaxi 初体验
外界对于轻舟智航的认知主要是那款约 6 米长的自动驾驶网约巴士(Robobus)——「龙舟 ONE」,主要用于地铁接驳、城市微循环等场景,如今已经在国内 6 座城市实现落地。

但是轻舟的产品线远不止于此。
其目前还有面向大巴的辅助驾驶方案,致力于智慧公交的改装。据知情人士透露,这套方案目前已分别跟陕西西咸公交、中通客车等合作落地车队。
另外,轻舟还有规划中的一款全新的车型「龙舟 SPACE」,主要是面向城市未来出行而设计,类似于此前 ZOOX 推出的全无人车型。
其实在更早之前,轻舟 L4 级自动驾驶研发是从 Robotaxi 开始的,目前这些 Robotaxi 已经在硅谷、苏州、深圳等地测试,规模有数十台。
之所以测试 Robotaxi,主要还是为了软件技术在不同场景下的持续迭代做准备。
因为轻舟团队认为,无论是现在主力在做的 Robobus,还是一开始就切入的 Robotaxi,以后都会殊途同归,那就是重新定义出一种无人驾驶的出行工具,在这类出行工具上,硬件方案、软件方案都必须是通用的,未来可以更好地进行移植。
所以这也是轻舟在同时测试 Robobus 和 Robotaxi 的原因,因为这两个场景都是其「自动驾驶超级工厂」不断进化的基础。一套成熟的通用性的 L4 自动驾驶系统,是轻舟智航在技术上的终极追求。

在轻舟智航发布第三代自动驾驶硬件方案的节点上,汽车之心在苏州实地体验了搭载了该方案的 Robotaxi 车型,实车见证这套硬件方案在感知层面的提升。
我们在苏州高铁新城的公开道路上,进行了一段实际体验,期间经历了等待红绿灯、跟车、被 Cut-in、绕行、变道、左转、右转、礼让行人等众多复杂场景。

从车内可视化界面的感知结果来看,车上的这套传感器对于车辆周围的车辆、道路边缘的护栏、行人、自行车骑行者都能非常精准的识别。
特别是针对远处有遮挡的自行车骑行者,系统同样可以识别,并且在可视化界面上进行分类建模。
在体验过程中,车辆的变道、转向、减速刹停等操作非常类似于老司机,很平稳。

而在等红灯起步的操作上,车辆则采取了更激进的操作,会有一个向前冲的动作,轻舟的工程师表示这是为了防止起步太慢被后车催促,也能避免被加塞。
我们在试乘过程中碰到了右后方车辆突然 Cut-in 的场景,本车进行了及时的减速避让操作,而且没有人为接管。

另外还碰到了行车道上出现停止车辆的情况,本车在感知到该车之后,成功实现了绕行,而且绕行动作很果断。

这里要提到轻舟智航的一项「时空联合规划」技术,这项技术可以在车辆横向转向和纵向的加减速操作上进行联合规划,寻找出一条最优行驶路径,而且是以最合适的速度行驶。
这项技术在绕行的场景中表现的非常明显,轻舟的 Robotaxi 在转向的过程中还轻微加了一点速来绕过前方的车辆,非常果断且顺滑。
此外,过程中还经过了一段狭窄路,路边停满了车辆,而且行车道前方出现车辆时启时停的情况,本车在进行了一段跟车之后,等待前方车辆变道后继续行驶。

轻舟的工程师表示,其自动驾驶系统的绕行逻辑是:如果前方是一辆静止的车辆,那么系统会果断进行绕行;
如果前方车辆时启时停,那系统则会进行跟车操作,直至前车离开。
在整个体验过程中,我们遇到了数十个红绿灯,感知系统对红绿灯能进行精准的识别,并且提前减速,平缓刹停,表现非常老司机。
在轻舟智航第三代自动驾驶硬件方案的加持下,轻舟的 Robotaxi 在感知层面的表现可圈可点。但也不得不承认,在某些规划和控制操作上其还未达到最佳状态,后续还有提升空间,需要从「老司机」向「超级老司机」进化。
2 年时间完成从 Robotaxi 到 Robobus 的拓展,在 10 城的多类场景落地 10 款车型,搭建起近百台规模的车队,轻舟智航的通用性自动驾驶软硬件方案为这样的高效率贡献了力量。
而在未来将推出的更多自动驾驶车型上,这间「自动驾驶超级工厂」还将发挥更大的效用。
轻舟智航的自动驾驶硬件方案已迭代至现在的第三代,后续还要引入更符合车规级要求、性能更强大的英伟达 Orin 计算平台。在硬件方案上与时俱进,增强适配性的基础之上,就看后续其自动驾驶软件方案如何持续进化。
按照轻舟智航的规划,他们的整套方案,不但要向上、向更高级别的自动驾驶突破,而且还要向下兼容,去满足未来乘用车量产自动驾驶的需求。
众所周知,现在很多量产乘用车都确定要用英伟达的 Orin 芯片,同时激光雷达上车也是大势所趋,这正好与目前轻舟智航搭建的自动驾驶硬件架构不谋而合。
所以,从量产乘用车自动驾驶,到 Robobus、Robotaxi 再到未来专门为无人化出行而打造的车型,都有轻舟智航通用性自动驾驶系统的用武之地,加上美团龙珠这些产业投资方的助力,未来在物流领域或许也将大有可为。
现在轻舟智航还在努力的打好自己的地基,为日后在自动驾驶领域起高楼做充分的准备。
1
分享
好文章,需要你的鼓励

相关推荐
-
 华为乾崑智驾,今年会赢家通吃吗?
华为乾崑智驾,今年会赢家通吃吗?1年前
-

-

-

-

-






参与评论
请您注册或者登录汽车之心社区账号即可发表回复
去登录
相关评论(共1条)
查看更多评论