
百度Apollo5.5发布,这次带来了哪些新能力?

今天,在长沙Apollo生态大会上,百度发布Apollo开放平台的第八个版本——Apollo 5.5。
来看看这次百度Apollo带来了哪些新能力。
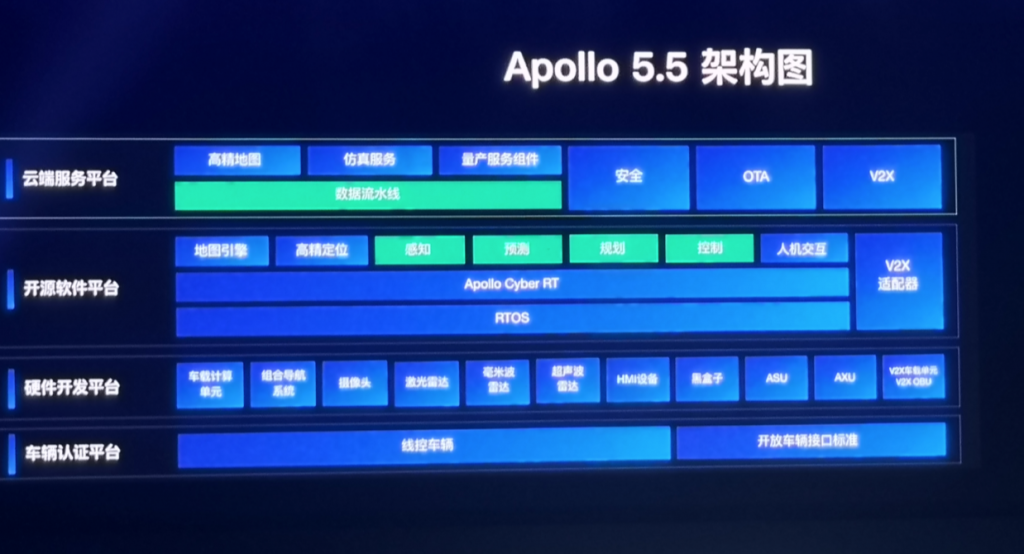
上图是Apollo 5.5的开放架构图。Apollo从1.0到5.5,一步步开放出了完整的感知、规划、控制等自动驾驶能力。
在Apollo5.5的点到点城市自动驾驶中,针对复杂的道路、复杂的交通参与者、复杂的驾驶行为、高标准的乘车体验,百度实现了包括窄道并线、借道错车、紧急停车、三点掉头、无红绿灯管控路口等多种复杂城市路况的自动驾驶。
在5.5点到点城市自动驾驶中,针对复杂的主车驾驶行为,规划与控制的配合也具有更大的挑战性。
在Apollo 5.5之前,控制模块只有一个外循环的车辆系统闭环,就是图中蓝色的模块。它从车辆状态中获取反馈来不断提升控制的精度,会假定控制命令都会很好得被执行器完美执行。
但是实际情况下,车辆的执行器因车而异,尤其是在横向上的偏差积累,在城市道路中连续变道的情况下,这样的偏差会逐步累积到控制器跟随不上的地步。
在5.5中,针对城市连续变道和紧急停车场景,百度新增加了3个绿色模块,形成了MRAC双循环控制器,可以很好地提升控制精度,在城市复杂连续变道和弯道的场景下,横向精度相比之前提升了60%。
值得一提的是,Apollo 5.5首次提出了舒适度指数。
舒适度指数,是基于熟练的人类司机驾驶的行为,进行数据上的分析和拆解,对于横纵向的速度,加速度和加速度导数进行数学建模,从而计算出在不同速度下的舒适驾驶的一个评估体系。
在没有舒适度指数的时候,每一次规划算法的更新对于体感的影响,比如晕眩,都必须通过实际路测去验证。而在点到点城市自动驾驶中,因为路线的起终点排列组合,使得需测试路线的道路数和复杂度呈指数级上升。
现有了舒适度指数,开发者们在仿真的环境里就能了解规划算法的更新带来的体感的影响,大大提高迭代的效率。
本文为汽车之心原创文章,作者:汽车之心,如需转载,请联系授权。违规转载法律必究。
0
分享
好文章,需要你的鼓励












参与评论
请您注册或者登录汽车之心社区账号即可发表回复
去登录
相关评论(共0条)
查看更多评论